|
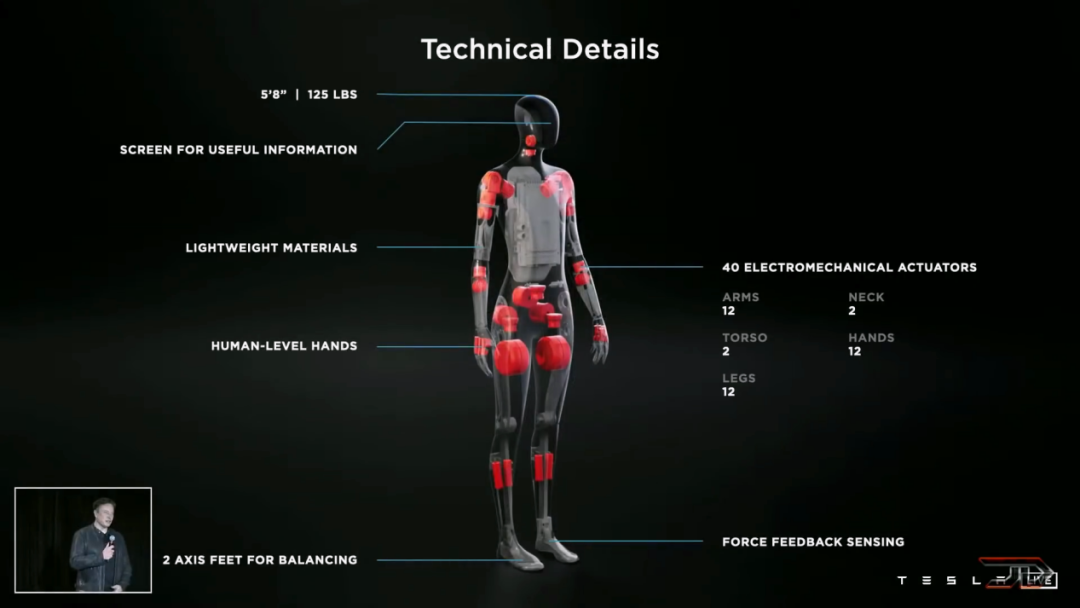
近年來因人工智慧的發展迅速,人型機器人(Humanoid Robots)也跟著AI的發展快速而被重視及研究,人型機器人相關的機構涵蓋了許多領域,包括機械設計、運動控制、人工智慧、機器視覺、人機互動等。其中人型機器人最重要的部件除了晶片以外其傳動結構也是在人型機器人中佔非常重要的一環。人型機器人在所有的運動中腳部的移動、跳動,手部的旋轉、上下位移及手腳互動的搬運物件所須要的快速反應及承載扭矩的變化,而馬達及減速機構就成為重要的部件了。一個完整的人型機器人通常包含以下關節驅動系統: |
總計:
每個驅動系統通常包含:
|
|
|
人型機器人的驅動與減速機構的種類
|
|
|
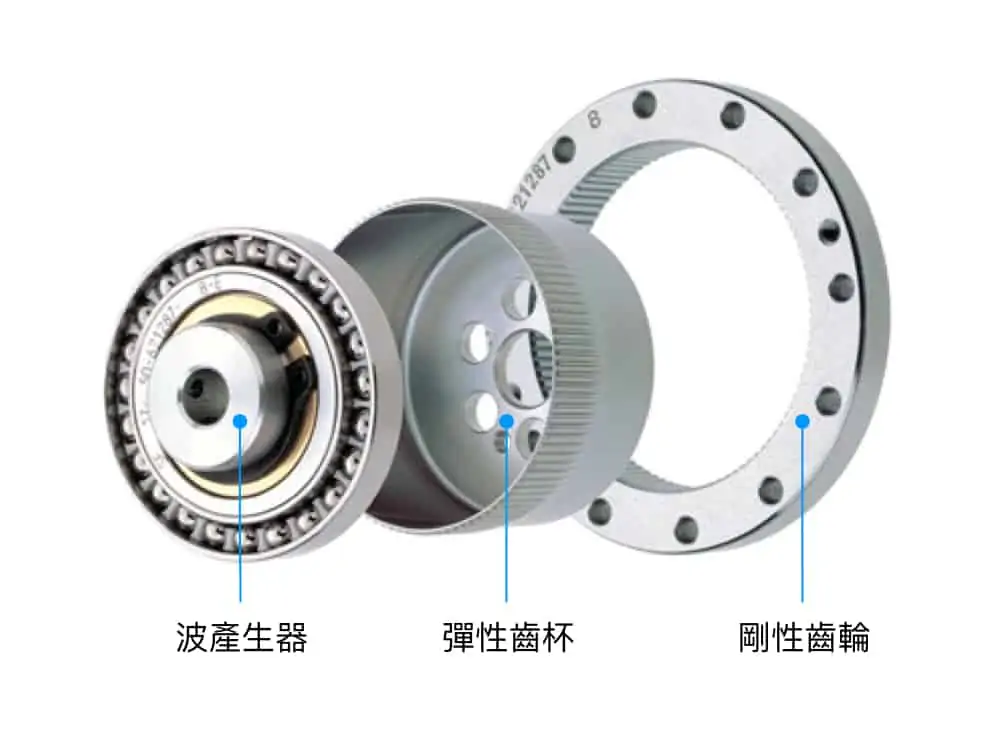
人型機器人減速機構中諧波減速機和行星式減速機其具體分布為: 諧波減速機(約15-20個)主要用於:
約占總體40% 至 60% 的減速機用量。 |
|
|
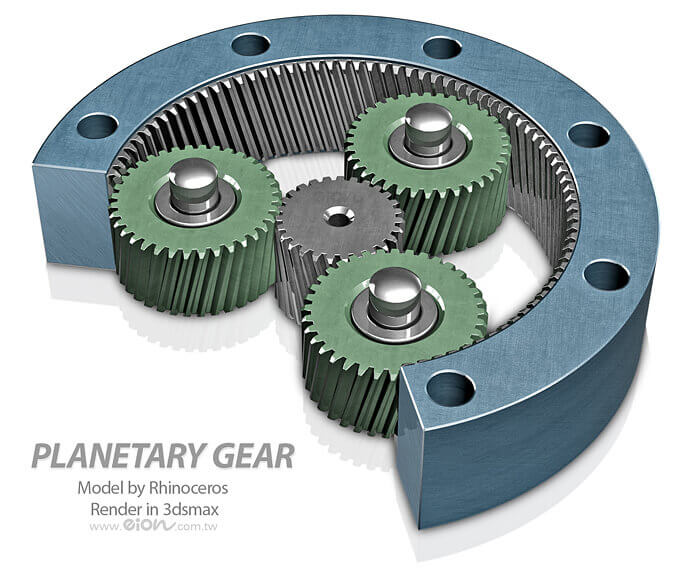
行星式減速機(約10-15個)主要用於:
也是約占 40% 至 60% 的減速機用量。 |
|
|||
|
選擇使用何種減速機構的標準:
這種配置可以確保:
選擇考量因素:
|
| 齒輪減速機構在人型機器人領域扮演著不可或缺的角色,其應用範圍涵蓋了從精密控制到動力傳輸等多個方面。在現代人型機器人設計中,主要採用諧波減速器和行星齒輪減速器兩種類型,這兩種減速機構各具特色,在不同的應用場景中發揮著重要作用。 |